LXLR-FR3300L
300kg 定格負荷

モバイルロボットの開発は「低端」から「インテリジェント」へ、そして「弱い認識」から「強い認識」への急速な進展を遂げてきました。
マシンビジョンは大きな可能性を秘めている
LiDAR技術の進展により、レーザー航法は業界の主流な方法の一つとなっています。レーザーSLAM(Simultaneous Localization and Mapping)を基にしたAMR(自律型移動ロボット)ソリューションは様々なアプリケーションに実装されています。しかし、レーザー航法の利用が広がる中で、その限界も明らかになっています。特に複雑な環境での安定した位置決めに関して課題が浮き彫りになっています。
動的な環境では、商品が常に移動しており、固定された基準点が稀なため、レーザーSLAMを使用するロボットは信頼性のある位置決めに苦労することが多いです。倉庫エリアの出入りが頻繁に行われるため、環境が絶えず変化し、位置決めの一貫性と精度が難しくなります。
広い工場などの大規模なオープンスペースでは、鋼製の柱の間隔が広いため、LiDAR搭載ロボットは点群が希薄であり、信頼できる基準点が不足しているため、ナビゲーションの信頼性が低下します。
しかし、ビジュアルSLAMは、ロボットに搭載された深度カメラを使用して周囲の環境の画像をキャプチャし、密な点群を生成します。この豊富な環境データにより、ロボットは局所的な変化にもかかわらず安定した位置決めを維持でき、さまざまなシーンへの適応性が優れています。
ビジョンベースのソリューションの挑戦的な道
ビジュアルSLAMが環境適応性の面で明確な利点を持っているにもかかわらず、市場では採用している企業は少数派です。その主な理由は、深度ビジョンの高い技術的ハードルであり、多くのAMR企業は自社内での開発が難しいという現実があります。これには、視覚技術の研究開発チームや関連する技術的専門知識が不足していることが影響しています。
LANXINのMRDVS部門は若いチームでありながら、光学とコンピュータービジョンにおいてほぼ20年の経験を有しています。この専門知識により、コンピュータービジョンとモバイルロボットの組み合わせによる包括的な研究開発能力を築くことができました。
より成熟したLiDAR技術と比較すると、深度ビジョンは「挑戦的な道」であり、MRDVSはその道を選択しました。技術開発に数年を要し、MRDVSはモバイルロボットのために堅牢で完全な深度ビジョンシステムを確立しました。このシステムは、独自開発の3Dビジョンセンサーと認識アルゴリズムを含み、LANXINは中国で初めてモバイルロボット向けに完全統合された3Dビジョンのハードウェアとソフトウェアソリューションを提供する企業となりました。
このシステムにより、ロボットは視覚的な位置特定、障害物回避、高精度のドッキングを実現し、安全性、安定性、知能を大幅に向上させ、より複雑な環境にも対応できるようになっています。
事例研究:大規模倉庫ソリューション
例えば、3000以上の収納位置を持つ大規模な契約製造業者の倉庫を考えてみましょう。商品は頻繁に出入りし、パレットやアイテムの配置は絶えず変動しており、固定の基準点はありません。ロボットは作業員や通路に置かれたダンボールなどの障害物に遭遇することもあります。さらに、倉庫の美観や展開の簡便さを保つため、クライアントは床にQRコードをマークすることを避けたかったのです。

このシナリオでは、選択肢はレーザーSLAMまたはビジョンSLAMを搭載したフォークリフトに限られていました。しかし、レーザーSLAMを使用するロボットは、動的な環境で信頼性のある位置特定に大きな課題を抱えていました。最終的にクライアントは、LANXINのビジョンSLAMソリューションを選びました。
MRDVSは、LANXINのフォークリフトに視覚的な位置決定、パレットのドッキング、障害物回避のための統合ソリューションを提供します。
ナビゲーションには、フォークリフトが3DビジョンSLAMシステムを使用します。深度カメラは、マークのない3D環境データをキャプチャし、密な点群を生成します。そして、収集したデータをロボットの実際の位置とリンクさせ、自己位置決定とナビゲーションを実現します。この利点は以下の通りです:
人や車両、物流に影響されない信頼性と安定性。
レイアウトやパレットの配置の変更に影響されない動的環境への適応性。
一般的な環境における精度は±1cm。

パレットのドッキングには、3Dビジョンドッキングシステムを使用します。カスタム設計されたカメラが画像をキャプチャし、パレットの点群を生成します。これにLANXINのビジョンアルゴリズムを組み合わせることで、ロボットはずれの値を計算し、ポーズやフォークの方向を調整してパレットを正常にピックアップすることができます。
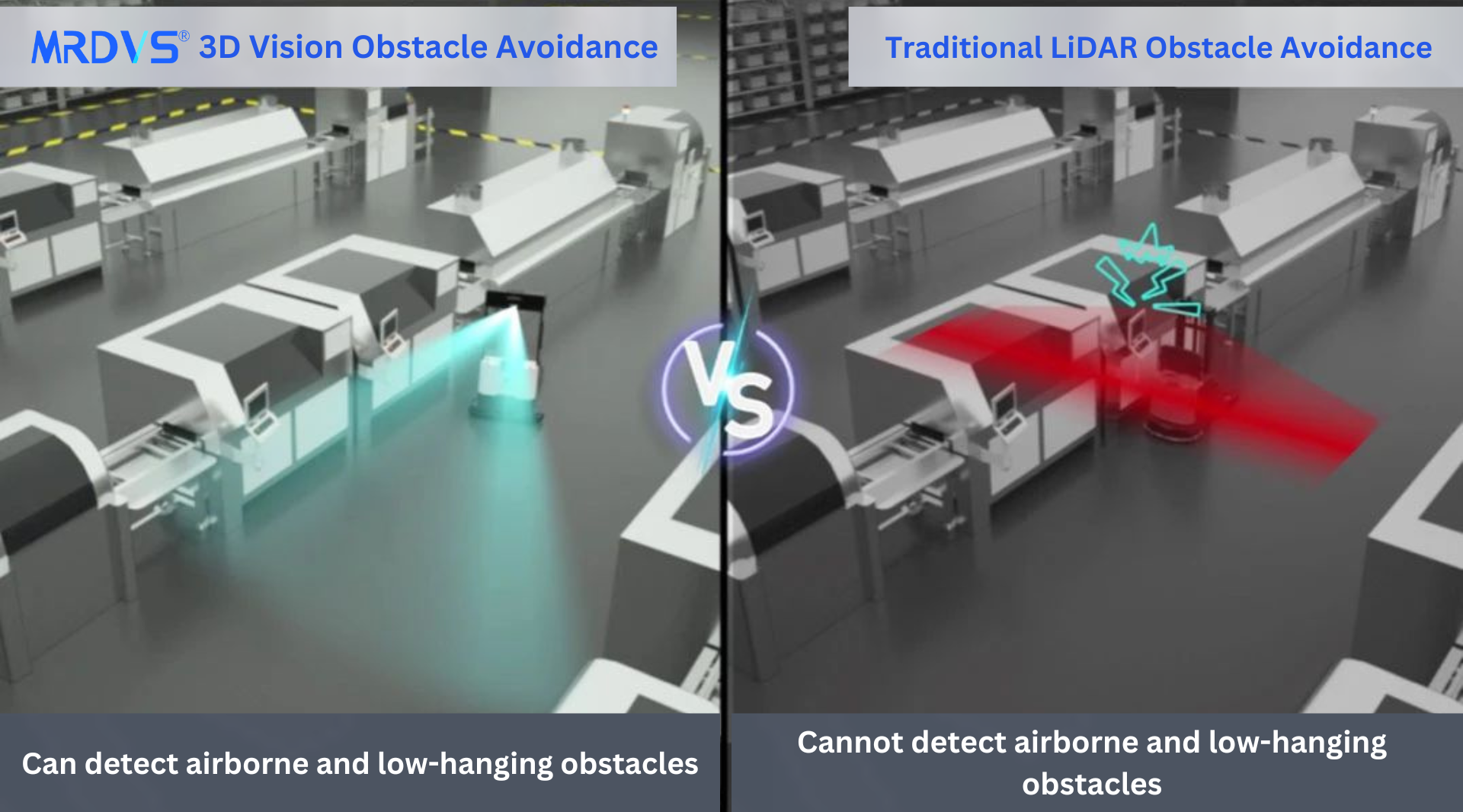
さらに、フォークリフトには、ロボットの視野内の空中および低い障害物を検出する3Dビジョンベースの障害物回避システムが搭載されており、安全な運転が保証されています。
MRDVSの深度ビジョンシステムにより、LANXINはクライアントの要求を完全に満たすスマートな無人倉庫物流ソリューションを提供しました。
お問い合わせ
Lanxin Robotics Japan株式会社、名古屋市港区泰明町1-5
marketing@lanxincn.com